智汇+首页
智汇+首页










进入店铺
2222222222




 应用方式:搬运应用
应用方式:搬运应用
 应用行业:汽车制造
应用行业:汽车制造
 案例地址:广东省佛山市南海区
案例地址:广东省佛山市南海区
 发布时间:2020-03-12
发布时间:2020-03-12
价格:260万元
收藏
 4386
4386
立即雇佣他
工业4.0 ——高精度图像视觉算法 机器人动态抓取码垛 (机器识别分拣)
机器人柔性抓取系统
多关节六轴机器人柔性抓取,采用Tracker实时位置跟踪程序,保证抓取的高效快捷和动态定位功能。

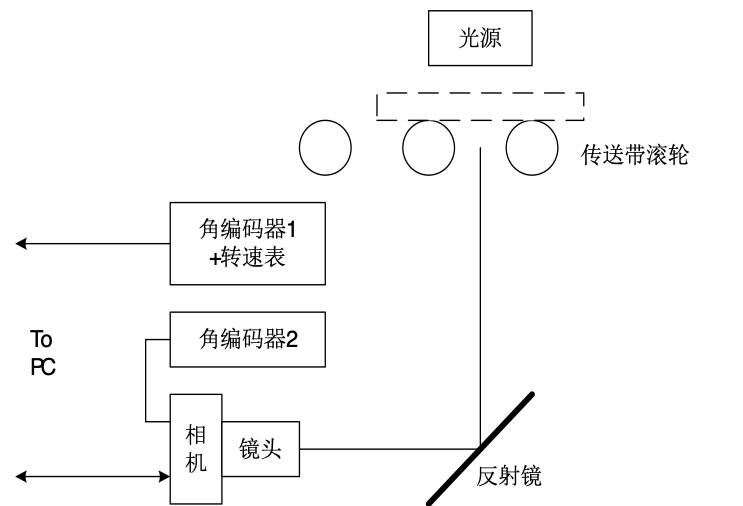
定位数据跟踪采集系统
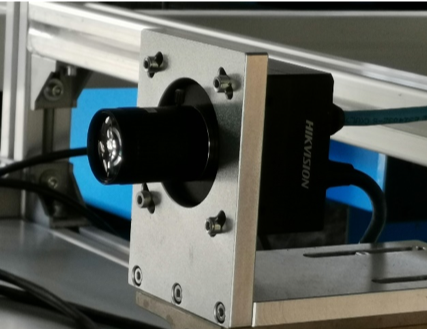
此分系统PC同时负责抛光机后图像采集系统的控制,包括光源开关控制、线阵相机图像采集、传送带速度采集。
采用顶部照明,线阵相机采集工件遮挡阴影的方式获取图像。同时在传送带上加装角编码器以便获取工件运动速度和图像长度修正信息。

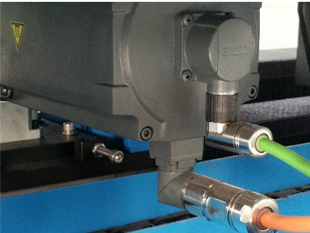
外部轴协调运动系统
为了最大限度提供机器人的抓取范围和工作效率,配置外部地轨运动系统,利用西门子伺服驱动器高速动态响应和高扭矩,机器人系统与可编程逻辑控制器(PLC)通过现场高速网络总线通信实现控制,目前基本可以达到0.2S内完成20M/min的定位功能。